
星动XHAND1运用ERA-42模型取得的成就令人瞩目,在具身大模型领域引发了广泛关注。该模型在单一架构下实现了多样化的精准操作,这在行业内尚属先例。

星动XHAND1操作新突破
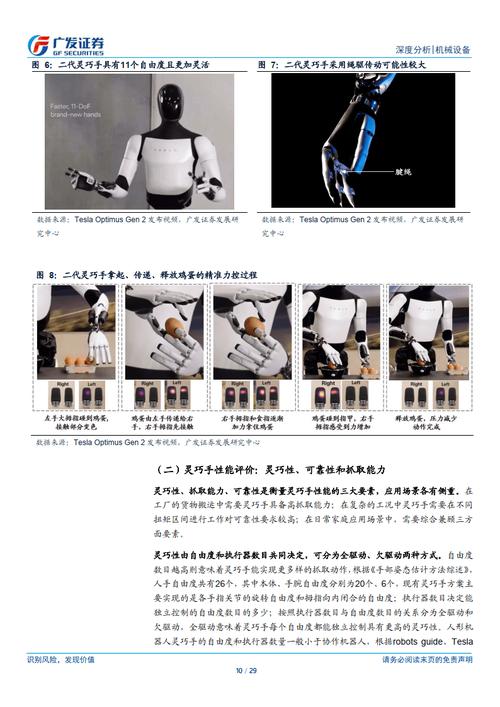
星动XHAND1依托于ERA-42技术,能够利用多种工具执行多样化的精细操作。这一成就,尤其在工业和机器人操作领域,被视为一项重要突破。据信,该技术可能源于星动纪元的研发机构。该机构能够运用同一具身大模型,实现上百种类似于人手的复杂动作,例如精密的物品装配等。


此成果无需预先编程知识。凭借卓越的泛化与自适应能力,仅需约两小时,通过收集少量数据即可掌握新任务。星动XHAND1在执行新操作时,会持续记录数据,并将这些数据反馈至ERA-42,以持续提升其性能。
ERA - 42的开创性意义

星动纪元推出了名为ERA-42的国内首款端到端原生机器人大模型。该模型诞生于星动纪元的实验室,由该机构的专家团队经过多年潜心研究开发而成,目前其技术水平已达到国际领先地位。


PI推出的π0模型与之同步进步。π0通过整合视觉-语言预训练和操作数据集进行训练,实现了显著成果。同时,ERA-42模型将世界模型纳入其中。这一创新显著增强了模型对物理世界的理解力,进而提高了其预测、泛化及自适应等方面的能力。
通用灵巧操作的引领者


星动XHAND1相较于传统夹爪展现出显著优势。在星动纪元的测试区域内,XHAND1凭借ERA-42系统,高效地执行了超过一百项精细且复杂的操作任务,包括对微小零件的抓取与安装等。
ERA-42在整合进世界模型后,对物理世界的理解能力增强,并具备了对未来的预测功能。这一改进显著提升了任务完成率。例如,在复杂空间环境模拟的救援任务测试中,其泛化性能相较于早期版本有显著提升。
ERA-42的泛化能力显著提升。据收集的数据显示,其在执行独立任务及长序列任务时,完成度均较高。在遥控探测机器人任务测试中,ERA-42能够迅速适应不同环境下的任务需求。


其适应能力显著。在复杂干扰环境中,诸如遭受磁场干扰或视线受阻的仓库拣选场合,它表现出了卓越的抗干扰性能。
STAR-42初步展现了“规模效应”的特点。在研发中心,星动纪元依靠软硬件的协同更新,借助星动XHAND1的高效作业能力,与ERA-42共同执行了一系列复杂且精巧的任务。
操作任务实例与优势


在执行操作任务时,类似于精密仪器生产流程中,星动XHAND1在ERA-42系统的辅助下,已成功执行了精密仪器零部件的组装。此类任务对操作精度有着极高的要求,过去同类模型往往难以胜任,而如今其成功率显著提升。
在太空模拟任务中,星动XHAND1可执行对模拟星球岩石的样本采集等复杂操作。该场景对操作精度与灵活性有严格要求,而ERA-42系统则为其提供了卓越的决策与操作支持。

对行业发展的影响

该成果对机器人产业将带来显著影响。众多机器人制造商可能采纳星动纪元的理念。例如,部分小型研发企业将在其新一代产品开发中,借鉴ERA-42等大型模型的构建方法。
人工智能机器人的研发领域即将迎来新的发展高潮。众多高校的机器人实验室以及专业的研发机构都将对此项成果进行深入探究。以某知名高校为例,该校已明确表示将组织专题学术会议对此成果进行研讨。
未来展望与疑问


星动纪元能否持续增强其领先地位?这一技术是否能在服务机器人、军事机器人等领域得到更广泛的应用,以增强其功能?我们期待在评论区看到大家的讨论,并鼓励大家点赞和转发,以便让更多的人认识到这一令人鼓舞的成就。